Vom Mobilbagger zum Seilroboter – wie wird der Materialtransport auf Baustellen zukünftig aussehen?
Kooperation · Studium · TU Dresden · 1. März 2021 · Technisches Design ·






Mit dieser Fragestellung hat sich Martin Schumann im Rahmen seiner Belegarbeit im letzten halben Jahr sehr genau beschäftigt. Die Bauindustrie befindet sich im Wandel, sodass digitale Modelle zukünftig die Grundlage der Kommunikation aller Gewerke auf einer Baustelle bilden werden (Stichwort: Building Information Modeling). Eine immer stärker fortschreitende Vernetzung und Automatisierung von Maschinen und Abläufen schafft ein völlig neues Potential für Maschinenkonzepte. Aus diesem Grund war es die Kernaufgabe in diesem Projekt das Konzept von bisher etablierten Mobilbaggern zu hinterfragen und basierend auf deren Arbeitsaufgaben neue Ansätze für ein Cyber-Physisches System zu entwickeln.
Aufbauend auf einer weiträumigen Recherche- und Analyse-Phase zu Mega-Trends in der Bau-Industrie, aktuellen Entwicklungen in der Baumaschinentechnik sowie Prozessbetrachtungen im Erdbau konnte Martin verschiedene Lösungsansätze entwickeln und in fünf Konzepte für ein neuartiges Maschinensystem zur Erdbewegung für den Zeithorizont 2040 überführen.
In einem Expertenworkshop wurde hieraus das Vorzugskonzept ermittelt und weiter ausgearbeitet: Ein Baustellen-Automat, basierend auf einem modularen Seilroboter System. Baustellen-Automaten bezeichnen hierbei eine Plattform für unterschiedliche, wechselbare Endeffektoren zur Nutzung in einer Vielzahl von Einsatzszenarien.
Wie kann man sich das im Detail vorstellen?
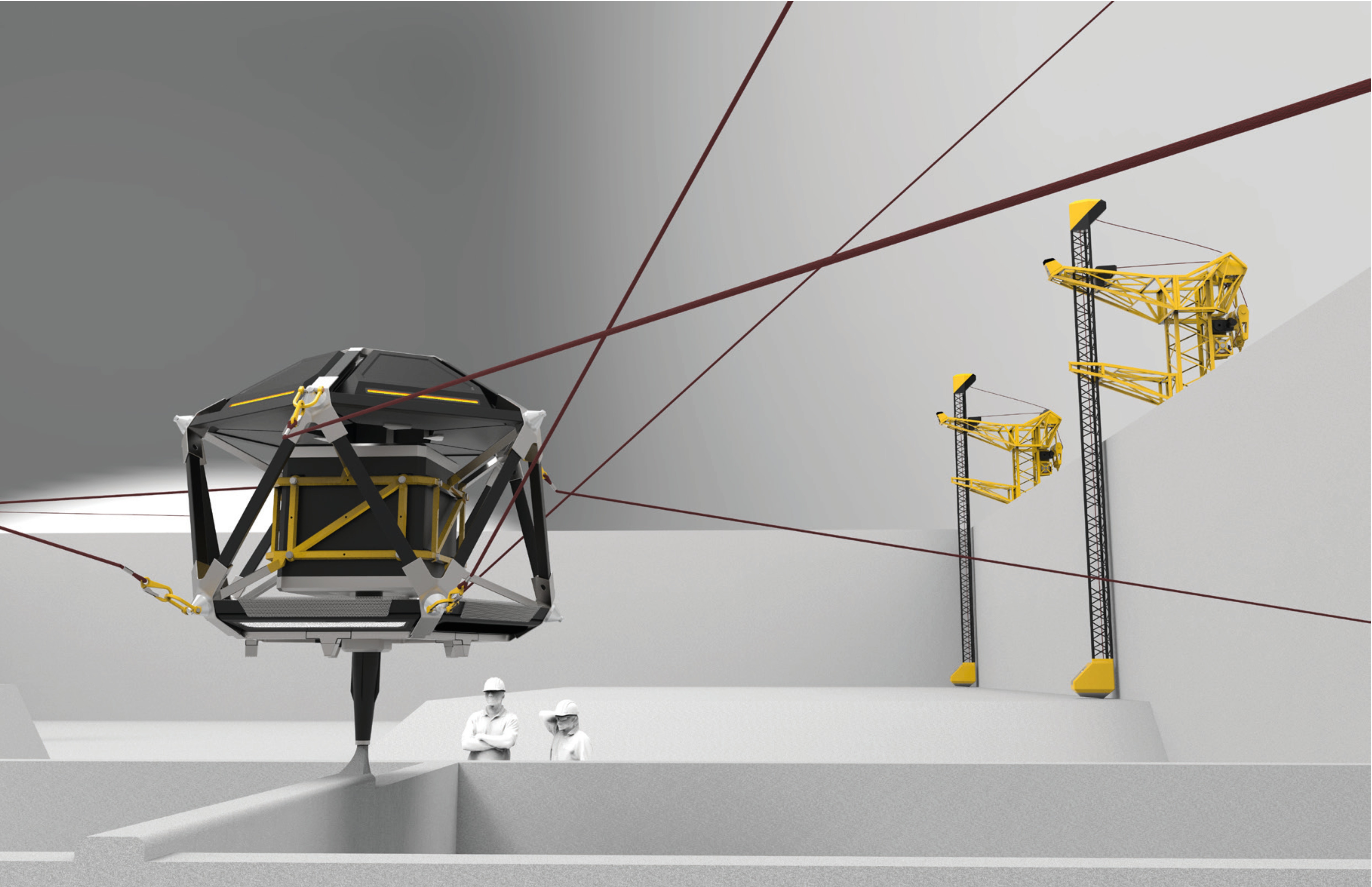
Eine Baugrube wird rundherum mit mobilen Stütztürmen umstellt, an denen je nach angestrebtem Arbeitsbereich ein oder mehrere End-Effektoren als Geräteträger aufgespannt werden. Dieser so genannte Cable Driven Parallel Robot (CDPR) bewegt sich automatisiert im vordefinierten Bereich und kann je nach Anbaugerät Abraum aus der Baugrube abtransportieren oder auch zur Ausbringung von 3D-Beton-Druck genutzt werden. Die vertikalen Turmstützen können dabei in die Höhe wandern, sodass ein Wachsen des Systems mit dem entstehenden Gebäude möglich wird.
Als Ergebnis dieser Studienarbeit ist ein Cable-Driven Parallel Robot für das Baustellen-Umfeld entstanden. Befestigt an verschiedenen Stütztürmen entlang einer Baugrube kann ein End-Effektor im aufgespannten Bauraum automatisiert verfahren. Der End-Effektor besitzt mittig eine Stützstruktur, an welcher verschiedenste Anbaugeräte angebracht werden können. Entgegen der fünfeckigen Grundform ist der Anbau-Bauraum quadratisch, um standardisierte Geräte verwenden zu können. verschiedene Schraub-Punkte ermöglichen einen individuellen Anbau.
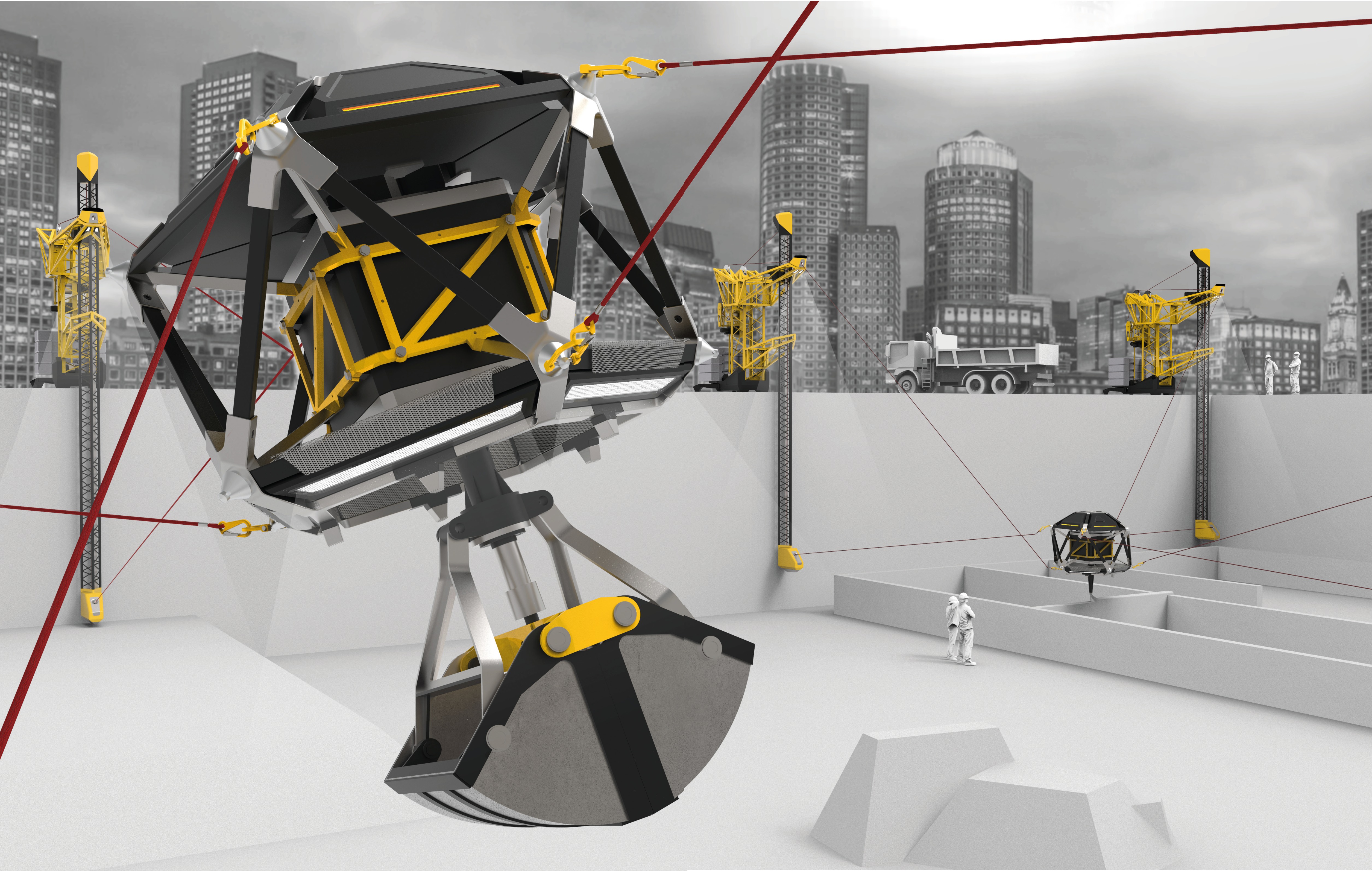
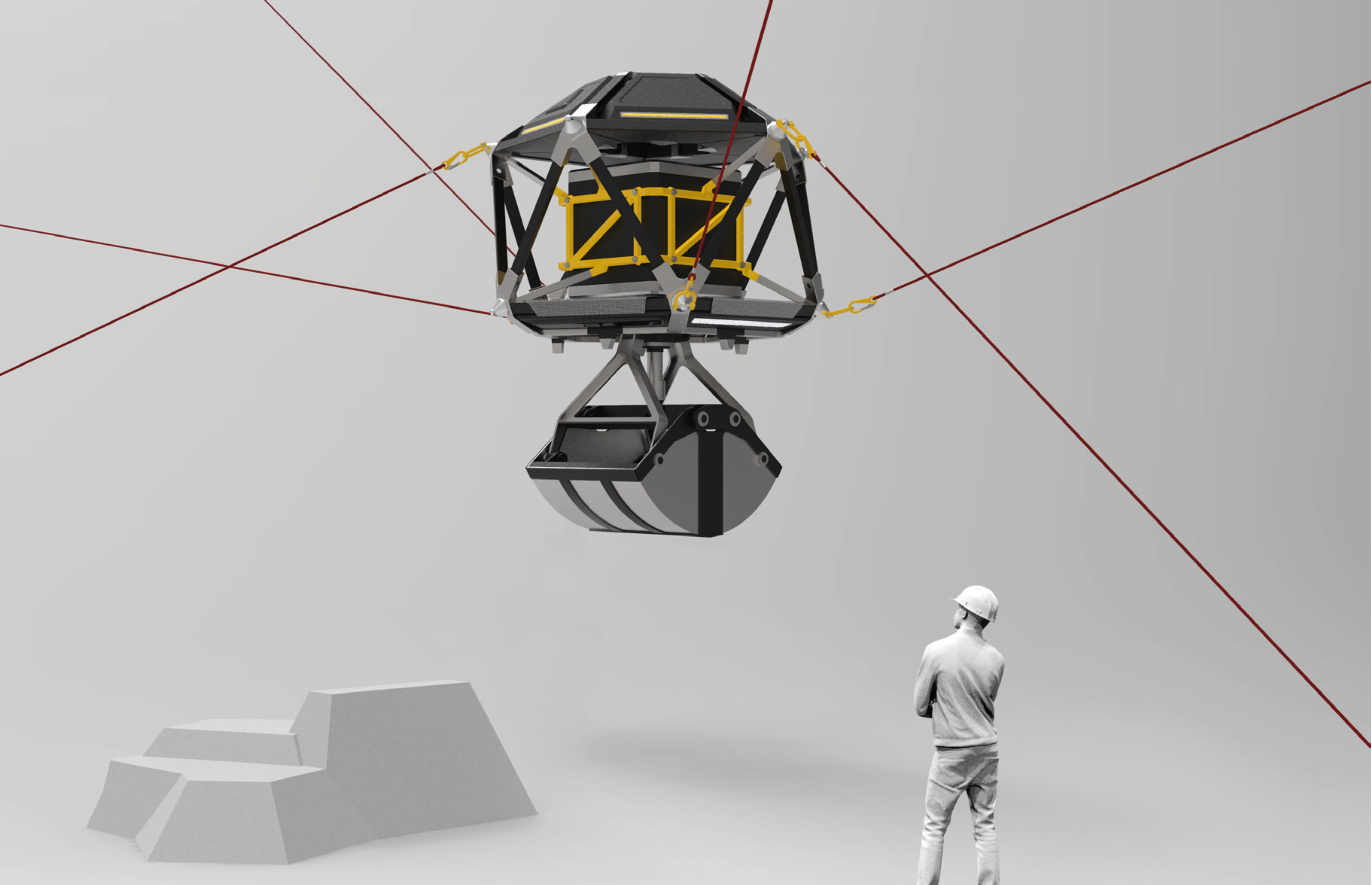
Für den Erdtransport wir ein Zweischalen Greifer als Anbau-Gerät vorgesehen. Dieser kann sich
in von anderen Maschinen aufgehäuften Abraum absenken und diesen abtransportieren.
Ebenfalls vorgesehen ist der Anbau einer Betonpumpe um den automatisierten Beton 3D-Druck
zu ermöglichen.
Zum Schluss ein kleiner Disclaimer:
Das Ergebnis dieser Arbeit ist als Konzept-Vorschlag zu verstehen, welcher dazu anregen soll einen Baustellen-CDPR tiefgreifender zu untersuchen und
zu entwickeln.
Es wurden, basierend auf aktueller Forschung, die Ansätze der Erdbewegung sowie des Beton-3D-Druck und Spritzbetonausbringung und weiterhin der automatisierten Mauerwerkslegung als Anwendungsfelder eines solchen Maschinenkonzepts dargelegt.