
Performance Indicator im Feldschwarm-Ökosystem entwickelt – Diplomarbeit von Tobias Höschele
Forschung · Kooperation · Studium · TU Dresden · Unsortiert · Wissenschaft · 14. Mai 2025 · Ulrike Janssen ·






Schlagwörter: Agrarrobotik, Ausbildung, Autonom, Diplomarbeit, Feedback, Feldrobotik, Feldschwarm, HMI, Landwirtschaft, MMS, Performance Indicator, Proof-of-Concept, Prototyp
Die moderne Landwirtschaft steht vor wachsenden Herausforderungen: Der Bedarf an Nahrungsmitteln steigt, gleichzeitig erschweren Fachkräftemangel und der Klimawandel die Feldbewirtschaftung. Technologische Innovationen wie autonome Roboter in Schwarmsystemen bieten hier große Potenziale.
Im Kontext des Forschungsprojekts Feldschwarm-Ökosystem, das sich mit der Entwicklung autonomer Schwarmsysteme für die landwirtschaftliche Feldbearbeitung beschäftigt, fertigte Tobias Höschele seine Diplomarbeit mit dem Fokus auf die Mensch-Maschine-Schnittstelle an.

Ziel war es, den Bedienkomfort sowie die Informationsstruktur bei der Überwachung und Steuerung mehrerer Maschinen signifikant zu verbessern. Zwei zentrale Herausforderungen standen dabei im Mittelpunkt:
• die verringerte Übersichtlichkeit bei der parallelen Überwachung mehrerer Prozesse und Maschinen
• die fehlende Präzision und haptische Rückmeldung bei der Eingabe sensibler Prozesswerte.
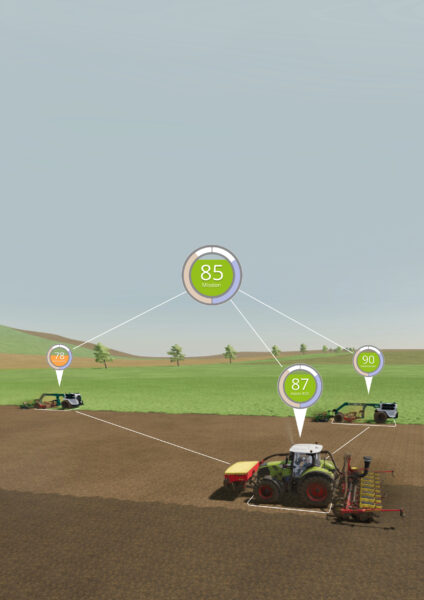
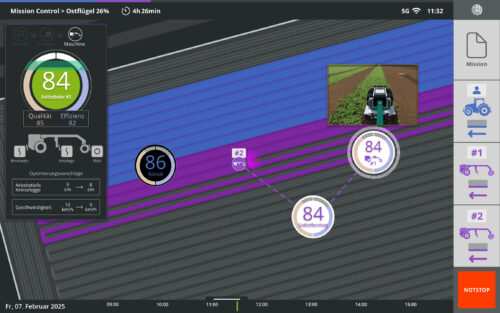
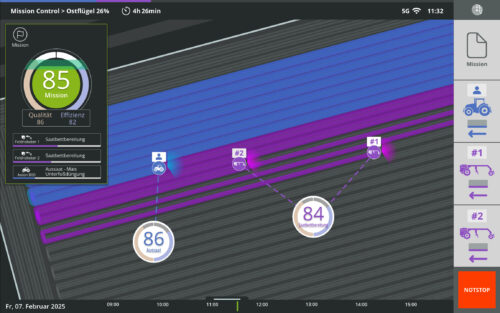
Das Kernelement von Tobias‘ Arbeit war die Entwicklung eines Performance Indicators, der in das bestehende User Interface des Feldschwarm-Systems eingebettet wurde. Er ermöglicht eine strukturierte und reduzierte Darstellung komplexer Systeminformationen, sodass Nutzende kritische Zustände schnell erfassen und interpretieren können. Ergänzend wurde eine haptisch-adaptive Benutzersteuerung auf Basis eines Dreh-Drückstellers entwickelt, die eine intuitive, ergonomische und blickfreie Interaktion erlaubt.
Im Verlauf der Arbeit wurden bestehende HMI-Ansätze, relevante Technologien und Nutzungsszenarien analysiert. Daraus wurden drei Integrationskonzepte für den Performance Indicator erarbeitet und bewertet. Eines davon wurde ausgewählt, detailliert ausgearbeitet und anschließend in einem digitalen, interaktiven Prototyp umgesetzt.


Die Entwicklung zielt auf eine Reduktion der Bedienkomplexität, eine höhere Akzeptanz bei zukünftigen Nutzenden sowie eine Steigerung der Effizienz in der Überwachung autonomer Feldrobotik.
Der Prototyp dient als Proof-of-Concept und bildet die Grundlage für zukünftige Usability-Tests sowie die weiterführende technische Umsetzung innerhalb des Feldschwarm-Projekts.

Die Arbeit leistet einen Beitrag zur nutzerzentrierten Weiterentwicklung von HMI-Systemen in der Agrarrobotik und zeigt, wie durch gezielte Informationsreduktion und haptisches Feedback die Bedienbarkeit komplexer automatisierter Systeme verbessert werden kann.
