Intelligente Roboter-Roboter Kollaboration mit Werkzeugwechsel
Forschung · Studium · TU Dresden · 2. Mai 2024 · Technisches Design ·






Schlagwörter: CeTI, Collaboration, Designforschung, Robotik, Tactile Internet
Die Entwicklung von intelligenten Roboter-Roboter Kollaborationen und Workflows mit Werkzeugwechsel stellen in der Roboter-Programmierung eine zentrale Schlüsselrolle in der Integration von Robotern in der Industrie und im Handwerk.
Aktuell erschließt sich ein enormes Potenzial in der Integration von Robotern in eine Vielzahl unterschiedlicher Sektoren. Ein entscheidender Aspekt dieser Integration besteht in der Entwicklung intelligenter Roboter-Roboter-Kollaborationen und Workflows, insbesondere im Hinblick auf Werkzeugwechsel. Diese zentrale Rolle in der Roboterprogrammierung gewährleistet eine nahtlose Einbindung von Robotern in industrielle und handwerkliche Umgebungen.
Tom Keese, ein engagierter Studierender beim Technischen Design, setzt sich im Rahmen seines Forschungspraktikums mit den Feinheiten von Roboter-Roboter-Kollaborationen auseinander. Den thematischen Einstieg markierte die Auseinandersetzung mit grundlegenden Konzepte rund um Roboter sowohl in industriellen als auch handwerklichen Umgebungen. Durch gemeinsame Workshops mit Experten identifizierte und bewertete er Anwendungsbereiche für Roboter, was den Grundstein für sein Forschungsvorhaben legte.
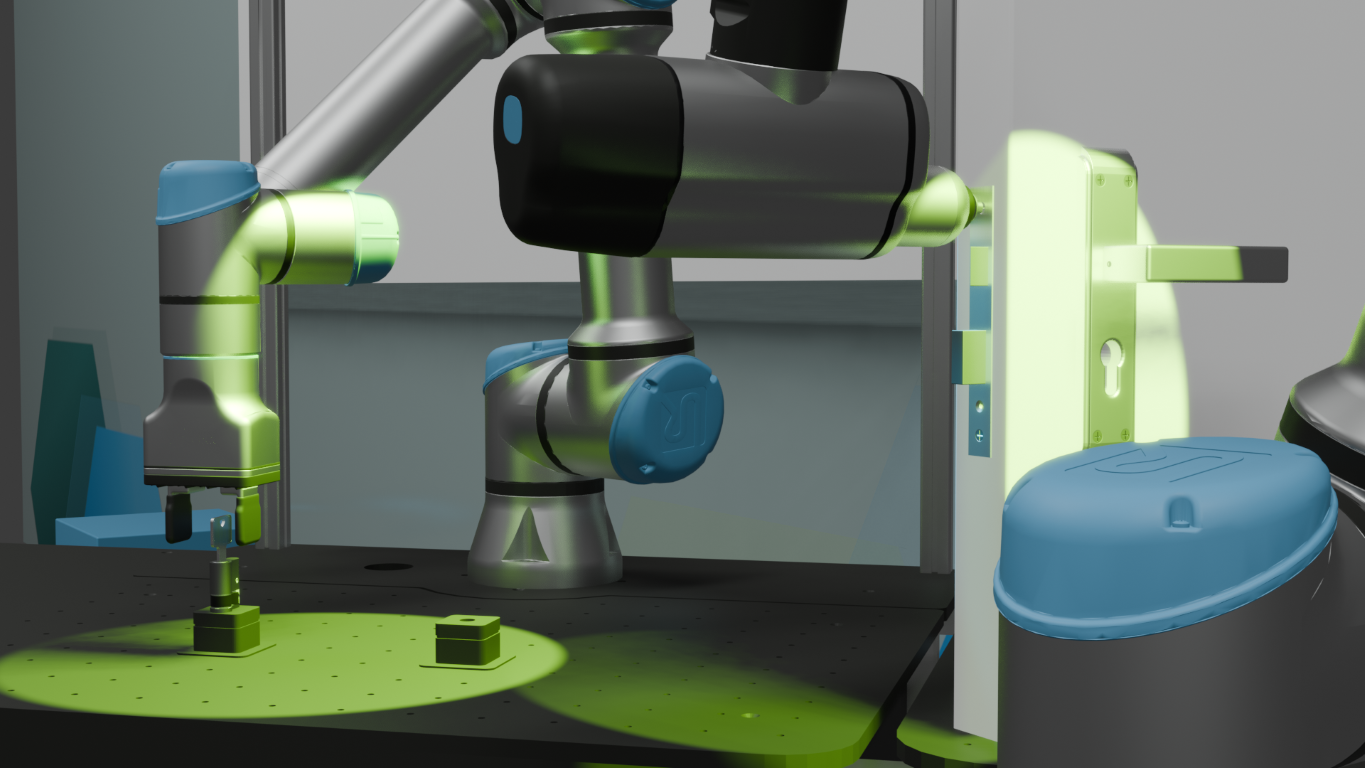
Ziel seiner Arbeit war es einen Forschungsdemonstrator zu entwickeln, um die Feinheiten von Roboter-Roboter-Kollaborationen zu untersuchen und darzustellen. Die Auswahl der Installation eines Türschlosses als repräsentative Aufgabe sollte die kollaborativen Fähigkeiten von Robotern verdeutlichen. Im Rahmen der Arbeit stellte Tom den Prozessfluss des Demonstrators dar und skizzierte jede Teilaufgabe der beteiligten Roboter. Mithilfe von Technologie- und Marktstudien evaluierte und wählte er geeignete Endeffektoren und Werkzeugwechselsysteme aus, um die Funktionalität des Demonstrators zu verbessern.


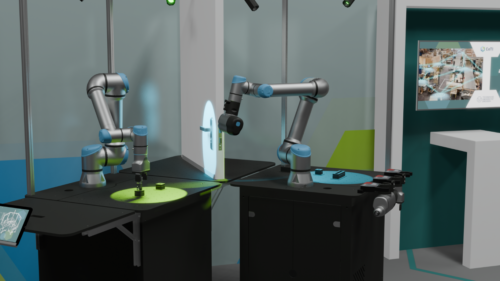
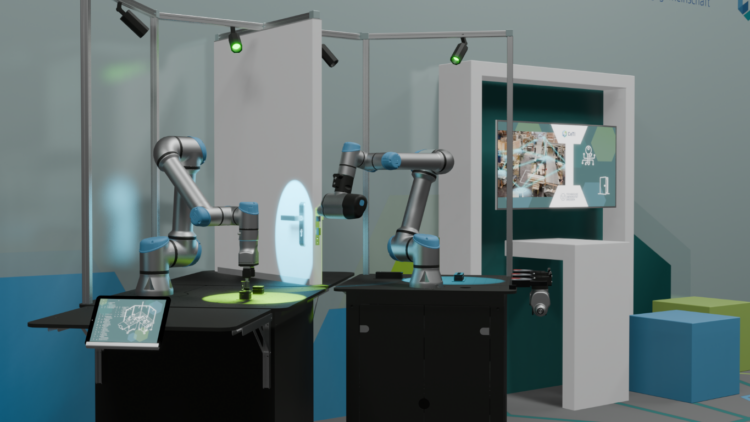
Im Ergebnis verdeutlicht Toms Arbeit das Konzept eines beeindruckenden Demonstrators. Bestehend aus zwei kollaborativen Roboterarmen, die auf CeTI-Cobot-Tischen montiert auf einem mobilen Roboterbasistisch positioniert wurden, ergibt sich ein sowohl übersichtliches als auch interaktives Szenario. Ein funktionsfähiges Türschloss diente als Mittelpunkt und bietet eine praktische Umgebung für den Installations- und Entfernungsprozess. Besonders Fokus liegt auf dem Nachhaltigkeitsaspekt des Demonstrators, der sich durch die Fähigkeit der Roboter, das Schloss autonom zu installieren und zu entfernen, bemerkbar machte und die Prinzipien der Kreislaufwirtschaft förderte.
Toms Forschungspraktikum lieferte interessante Einblicke in die Welt der Robotik und verdeutlichte das Potenzial für Innovation und Fortschritt in diesem Bereich. Sein Engagement und sein Beitrag haben nicht nur sein eigenes Verständnis bereichert, sondern auch einen wertvollen Beitrag für die Forschungsarbeit von CeTI geleistet.