
Innovative Robotersteuerung für minimalinvasive Weichgewebe-Operationen entwickelt
Forschung · TU Dresden · Wissenschaft · 3. September 2024 · Ulrike Janssen ·






Schlagwörter: Interface, Laparoskopie, minimalinvasiv, MIS, OP, OP-Roboter, RASS, Robotik, Steuerung, Surgery, SurgicalRobotic
In jüngster Vergangenheit hat die Robotik einen beeindruckenden Fortschritt erlebt. Was als einfache Industriemontageroboter begann, wird zunehmend immer individueller und kontextspezifischer in völlig neuen Anwendungsbereichen integriert. Die Vorteile der Robotik treffen mit der Chirurgie auf eine Branche, die durch die Entwicklung von robotischen Assistenzsystemen („robotically assisted surgical system“, RASS) ein neues Zeitalter der Präzision, Effizienz und Sicherheit bei minimalinvasiven Eingriffen eingeleitet hat. Diese Systeme werden eingesetzt, um Chirurgen bei komplexen Operationen zu unterstützen, die Durchführungsqualität zu optimieren und letztlich das Patientenergebnissen zu verbessern.
So hilfreich, präzise und leistungsstark diese Robotersysteme theoretisch auch sind – sie sind nur so gut, wie sie ihre Aufgaben in der Praxis tatsächlich umsetzen können. Eine große Hürde dabei ist die Qualität der Übersetzung der Anweisungen des Operateurs in effektive Instrumentbewegungen – also die intuitive Steuerung eines solchen RASS. Im Sinne der Zuverlässigkeit und Sicherheit der Anwendung chirurgischer Robotersysteme müssen potenzielle Risikofaktoren für Patienten und medizinisches Personal auf ein absolutes Minimum reduziert werden. Fehlinterpretationen von Gesten und Befehlen an der Benutzerschnittstelle haben unmittelbare Folgen auf den gesamten Operationsablauf sowie letztlich das Operationsergebnis beim Patienten und lassen daher keinen Spielraum für Fehler zu.
Wie aus zahlreichen anderen Anwendungsbereichen bekannt, halten auch hier displaybasierte User-Interfaces Einzug in die Konzeptionierung der Steuerung dieser robotischen Systeme und in die Kommunikation zwischen Operateur und Roboter. Aspekte der Ergonomie und der Usability, also der Nutzbarkeit, spielen hier eine zentrale Rolle.

Im Forschungsprojekt KOALA GRASP wurde eine Robotersteuerung für einen Assistenzroboter gemeinsam mit der Poliklinik für Viszeral-, Thorax- und Gefäßchirurgie des Universitätsklinikums Dresden entwickelt, der Greif- und Halteaufgaben bei minimalinvasiven Weichgewebe-Operationen übernimmt. Bisher übernimmt diese Aufgabe im Klinikalltag in der Regel eine OP-Assistenz. Für die Steuerung des Greifarms nutzen die Chirurgen eine Mensch-Maschine-Schnittstelle, also ein Interface, über welches die Richtung, die Abstände und die Kräfte eingegeben und manipuliert werden können.

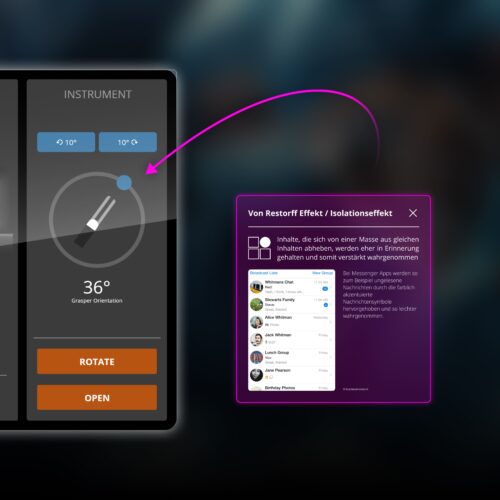

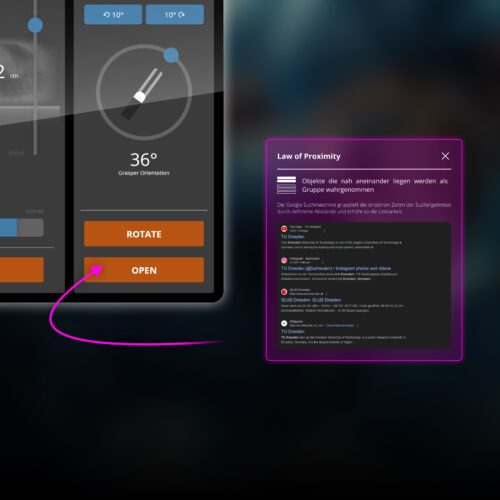

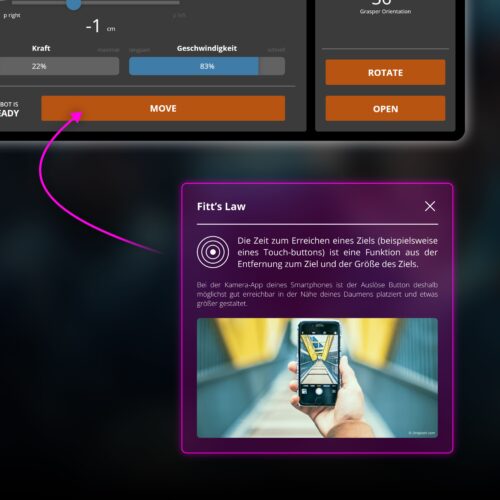
Für den bereits bestehenden Bedienprototyp wurde eine Nutzerstudie durchgeführt, die Erkenntnisse zum Umgang mit informationskomplexen Human-Machine-Interfaces in der laparoskopischen Chirurgie liefert.
Zu testen ist ein Exponat dieses Forschungsprojekts ab Oktober 2024 im Wissenschaftsforum COSMO, im Erdgeschoss des Kulturpalasts Dresden. Detaillierte Informationen finden Sie hier: https://www.cosmo-wissenschaftsforum.de/aktuelle-ausstellung/