Diplomarbeit Simon Schmitt – Überwachung und Steuerung hochautomatisierter Schwarmsysteme in der Landwirtschaft mittels bedarfsgerechter Mixed-Fidelity Prototypen
Forschung · Studium · TU Dresden · Wissenschaft · 21. August 2024 · Svenja Hammon ·






Schlagwörter: Abschlussarbeit, Designforschung, Diplomarbeit, Feldrobotik, Feldschwarm, HMI, Landwirtschaft, Mensch-Technik-Kooperation, Mixed-Fidelity-Prototyp, Prototyping, Steuerung, Transformation

Unter dem Druck des steigenden Bedarfs an landwirtschaftlichen Erzeugnissen, den spürbaren Konsequenzen des Klimawandels und dem Mangel an Arbeitskräften erlebt die Landwirtschaft eine digitale Transformation. Angesichts diesen Herausforderungen werden zunehmend unter anderem Feldroboter entwickelt und auf dem Markt gebracht, sodass diese bereits in naher Zukunft in hochautomatisierten Schwarmsystemen auftreten könnten. Damit verändern sich bestehende Produktionsabläufe und auch die Rolle des Menschen wird neu beschrieben. Da die technischen Systeme mittelfristig keine einhundertprozentige Zuverlässigkeit erreichen, bleibt der Mensch als korrigierende Instanz und als Trainer für die Automatisierung eine wesentliche Komponente für den reibungslosen und effizienten Betrieb. Gleichzeitig resultieren durch die geänderten Systemeigenschaften und Einsatzszenarien Herausforderungen wie die eingeschränkte Informationsverfügbarkeit in der Teleoperation, das damit verbundene Risiko des beeinträchtigten Situationsbewusstseins oder das Verlernen und die Entfremdung im Automatisierungsbetrieb, sowie die Nachlässigkeit durch fehlgeleitetes Vertrauen in das System.

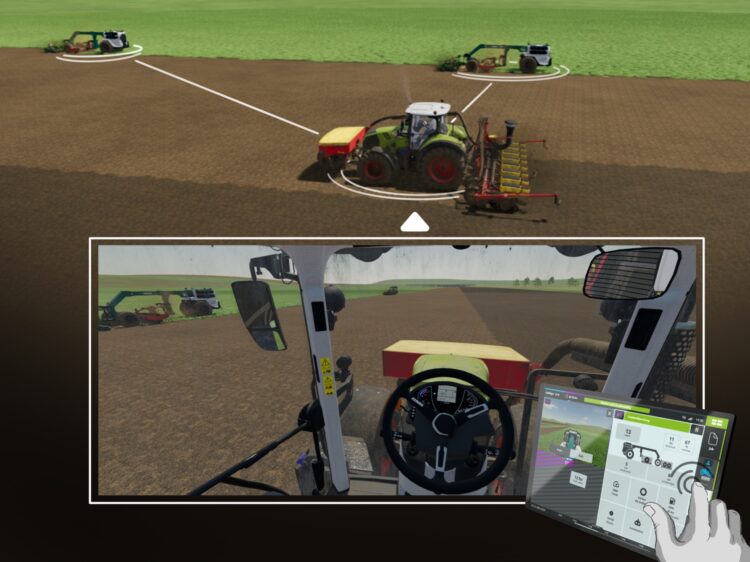
Simon Schmitt hat in seiner Diplomarbeit eine Benutzerschnittstelle (Human-Machine-Interface) für die Überwachung und Steuerung von Schwarmsystemen entwickelt und evaluiert. Dazu hat er nach einer Potential- und Akzeptanzbefragung mögliche Zielszenarien zusammen mit dem Konsortium des BMBF-geförderten Projekts „Feldschwarm Ökosystem“ erarbeitet und die Feldschwarm-HMI-Vision auf die neuen Anforderungen angepasst.
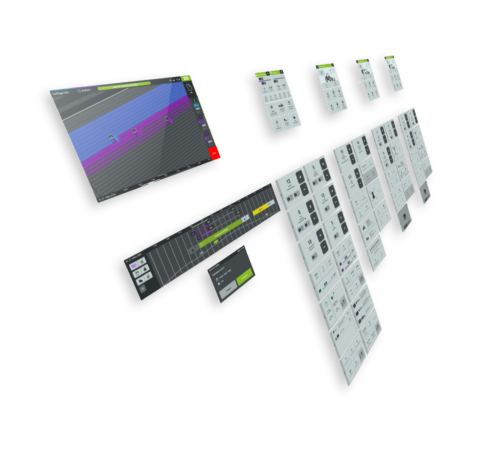
Eine Besonderheit von Simons Diplomarbeit besteht darin, dass das Konzept möglichst praxisnah mit den Anwendern aus der Landwirtschaft getestet wurde. Da es solche Szenarien (noch) nicht gibt, ging er der Frage nach, wie immersiv und interaktiv der Versuchsaufbau sein muss, um konstruktives und aussagekräftiges Feedback von den Probanden zu erhalten. In neuen, disruptiven Anwendungsszenarien zeigen sich technologische und funktionale Potentiale erst beim Lösen von Arbeitsaufgaben und Bediensituationen. Doch die Erzeugung eines entsprechenden leistungsfähigen Prototypens ist aufwändig und oft kostspielig. Ausgehend von wissenschaftlichen Frameworks zur Beschreibung der Realitätstreue von Prototypen (Fidelity) differenzierte Simon Eigenschaften für das prototypische HMI landwirtschaftlicher Schwarmsysteme.

Schließlich hat Simon den ausgearbeiteten Entwurf in interaktive Prototypen überführt und eine Simulation der Arbeitssituation mit zwei automatisierten Feldrobotern in unserem HMI-Lab (mehr zum Labor hier) aufgebaut. Der Versuchsaufbau umfasste aufgabenorientierte Usability-Tests mit einem Low-Fidelity Prototyp und insgesamt fünf kontextuelle Bediensituationen mit erhöhter Immersion und Interaktion durch einen High-Fidelity Prototypen. Neben der Evaluation der Leistungsfähigkeit und der User Experience vom Feldschwarm-HMI untersuchte er damit die Einflüsse der Prototypeneigenschaften auf die Bewertung durch die Probanden. Zum Abschluss seiner Arbeit begleitete er die Nutzerstudie mit Landwirten und Maschinenführern aus der Praxis und wertete die Ergebnisse aus.

Um die aktuellen Herausforderungen in der Landwirtschaft zu bewältigen, wird der Einsatz von Feldrobotern langfristig notwendig sein. Auf dem Weg der digitalen Transformation mit immer höheren Autonomiegraden gelten die Bedienbarkeit und das Zusammenarbeiten von Mensch und Roboter als Schlüssel. Dabei wird die Erforschung und Entwicklung intuitiver Schnittstellen eine entscheidende Rolle spielen. Die Diplomarbeit von Simon Schmitt trägt ihren Teil dazu bei.
