Szenarien im Sommerprojekt „Robotic Co-Working“
Kooperation · Studium · TU Dresden · 19. Juni 2017 · Technisches Design ·






Schlagwörter: 5G, Sommerprojekt, Tactile Internet
Vor einigen Wochen wurde hier bereits zum Auftakt des Sommerprojektes 2017 zum Thema „Robotic Co-Working“ berichtet. Thematisch spielt „Tactile Internet“ eine große Rolle: Haptische Interaktionen fast ohne Latenzen (Funkstandard 5G) eröffnen neue Interaktionsanwendungen. Auch Smart Materials, wie beispielsweise Formgedächnislegierungen, oder Piezokeramiken sollen in den Entwürfen als Anwendungstransfer zum Einsatz kommen. Inzwischen haben die zwei interdisziplinär aufgestellten Gruppen Einsatzszenarien ausgearbeitet, welche im nächsten Schritt eingegrenzt und konzeptionell weiterbearbeitet werden.
Die erste Gruppe betrachtet den Leistungssport und hat vier verschiedene Sportarten für eine smarte Exoskelett-Anwendung analysiert. Beim Szenario „Bogenschießen“ kommt ein Exoskellett im Schulter-, Arm und Handbereich zum Einsatz. Damit sollen Haltungspositionen korrigiert werden, um diese für ein effektives Training zu verinnerlichen. Im zweiten Szenario „Rudern“ kann mit einem Oberkörperexoskelett der Ruderrythmus mit jeweiligen Bewegungsabläufen trainiert werden, ohne dabei Kraft aufzuwenden zu müssen. Im dritten Szenario „Radfahren“ kann ein Smart-Exo für die Beinmuskulatur Bewegungen messen und durch Haltungskorrekturen Verletzungen vorbeugen und eine effektive Kraftübertragung gewährleisten. Im letzten Szenario „Klettern“ können Körperhaltungen für die Analyse gescannt werden. Ein Trainer im Motion-Capture-Anzug kann Haltungen taktil an die kletternde Person übertragen.
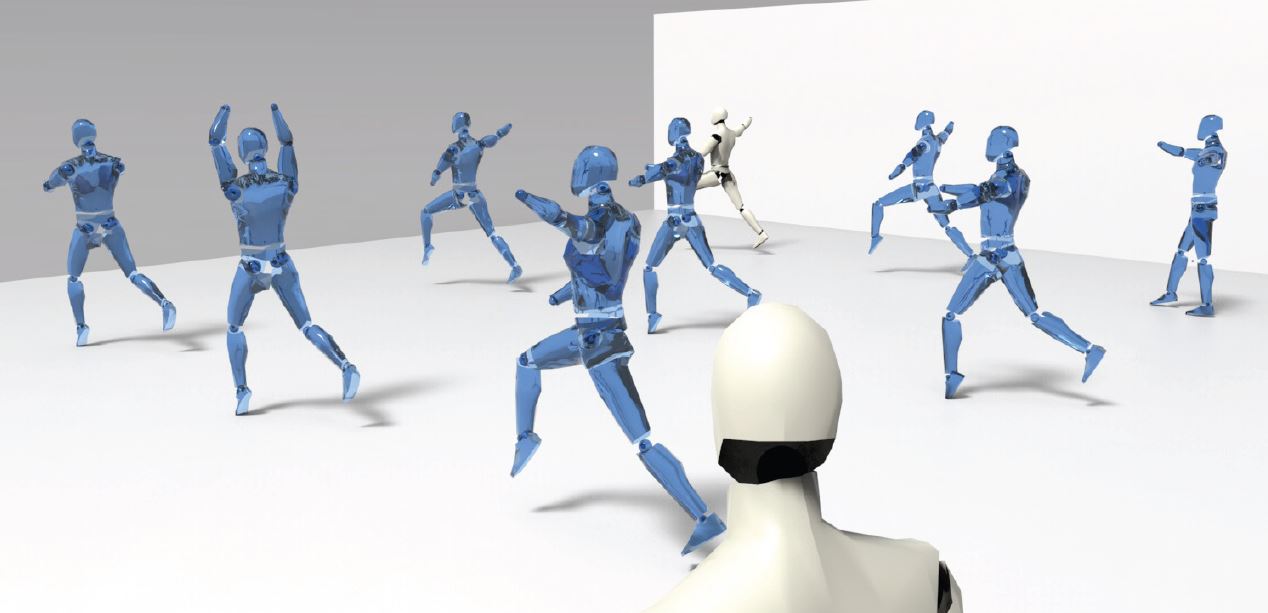
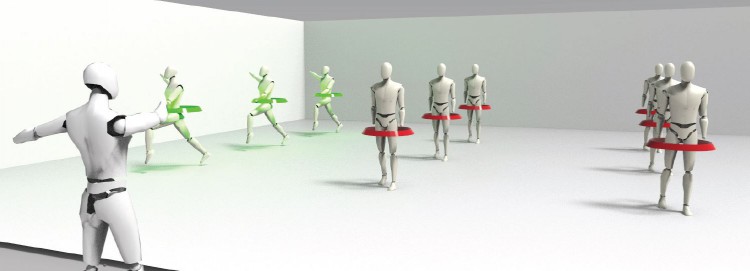
Die zweite Gruppe betrachtet den Bereich Tanz. In dem Szenario „Replacement“ geht es um das Anlernen einer Zweitbesetzung in einer Tanzkompanie. Virtuelle Figurinen können als tanzende Gruppe dargestellt und live durch den Choreografen im Smart-Feedback-Anzug ferngesteuert werden (siehe Bild unten). Für das Lernen von detaillierten Bewegungsabläufen hilft eine virtuelle Persona beim Training. Ein Exoskellett gibt zusätzlich Vibrationen für Richtungsimpulse. In dem zweiten Szenario „Ad-Hoc-Choreo“ wählt der Choreograf einzelne TänzerInnen oder Formationen aus und kommuniziert mit diesen taktil, um Änderungen oder Korrekturen vorzunehmen (siehe Beitragsbild). In dem letzte Szenario „Tanzen lernen“ kann ein Smart-Feedback-Anzug taktile Impulse geben, um z. B. Fehlhaltungen aufzuzeigen.