
Lehrveranstaltung nutzerzentrierter Produktentwurf beim Technischen Design
Extern · Studium · TU Dresden · 14. April 2022 · Technisches Design ·






Schlagwörter: CAD-Modell, Designprozess, Lehrveranstaltung, Produktentwurf
Auch dieses Semester hatten die Studierenden des 7. Semesters in der Lehrveranstaltung „Produktentwurf“ wieder die Möglichkeit, den Prozess einer Produktentwicklung zu durchlaufen. Aufgabe war es, ein Roboter-Mensch-System zur Unterstützung von Handwerker:innen zu entwickeln. Wie dieses System im Detail ausgestaltet ist, war den Studierenden freigestellt: So konnte die Lösung sowohl in einem völlig autonom arbeitenden Roboter liegen, als auch in (Teil-)Systemen, welche den Menschen bei seiner Tätigkeit unterstützen. Der Fokus lag dabei jeweils auf der Mensch-Maschine-Interaktion. Als Ergebnis entstanden digitale CAD-Modelle und Renderings, welche den Entwurf, das technische Funktionsprinzip, sowie die Interaktion mit Mensch und Umgebung verständlich visualisieren sollten. Als thematischen Rahmen wurden die Bereiche der Gartenpflege und Gebäuderestaurierung betrachtet. Der Fokus lag dabei auf körperlich schweren und zeitaufwändigen Arbeiten, bei denen Handwerker:innen in Zukunft noch besser zu unterstützt und entlastet werden sollen. Im Bereich der Gebäuderestaurierung betrifft das beispielsweise die Restauration von Türen, das Verputzen und Abschleifen von Wänden oder das Anbringen von Stuck. Für die Gartenpflege ist neben der Arbeit an sich auch noch relevant, dass eine möglichst geringe Störung von Besucher:innen der Grünanlagen erreicht werden sollte. Das betrifft beispielsweise die Bewässerung der Anlagen, das Entfernen von Unkraut auf Gehwegen oder Beschneiden von Hecken. Genau bei diesen Aufgaben haben die Studierenden angesetzt und Konzepte entwickelt, die zukünftig eine Unterstützung im Arbeitsalltag bieten können.

Sammelbild aller Entwürfe zur Gartenpflege
Am Anfang eines jeden eines Produktentwurfprojektes steht dabei die Recherche- und Analysephase. Dabei konnten die Studierenden die in den vorangegangenen Semestern erlernten Methoden anwenden. Hier wurden vor allem Umfeldanalyse, Prozessanalyse aber auch Personas und Day-in-a-Life genutzt. Besonders nach der Umfeldanalyse wurde klar, dass die Themenfelder der Gebäudesanierung und der Gartenpflege sehr komplex und vielfältig sind. Unter Beachtung relevanter Anforderungen konnten die Studierenden ihrer Kreativität freien Lauf lassen. Erste Konzepte waren schnell gefunden, welche im weiteren Schritt auf zwei Konzepte zur genaueren Ausarbeitung und Vorstellung reduziert wurden. Während des gesamten Projektes standen ihnen dabei Experten aus den Bereichen Robotik und Handwerk als Support zu Seite. Um sich der Dimensionen und Größenverhältnisse besser klar zu werden, haben die Studierenden schon früh in ihren Entwürfen mit Packaging-Modellen gearbeitet – eine Methode, in der sehr grobe physische oder digitale Modelle anhand der notwendigen Baugruppen und technischen Randbedingungen erzeugt werden. Darauf basierend konnte das Produktdesign entwickelt werden.
Im Ergebnis standen je zwei Konzepte, die in einem Pitch vorstellt wurden. Die ersten Zwischenentwürfe im Bereich Gebäudesanierung reichten von einer Maske zum Filtern schädlicher Aerosole über einen Bohnerroboter bis hin zu kleinen Schwarmrobotern, welche baufällige Gebäude erkunden sollen. Im Bereich Gartenpflege gab es Entwürfe zu Heckenschneiderobotern und Gießrobotern mit unterschiedlichen technischen Ansätzen. Durch regelmäßiges Feedback von den Experten in den jeweiligen Bereichen, konnten die Entwürfe mit jeder Woche verbessert werden und schlussendlich jeweils für ein Konzept ausgewählt werden. Dieses wurde detailliert als CAD-Modell ausgearbeitet. Mithilfe der CAD-Modelle konnten digitale Renderings erstellt werden, welche die Konzepte in der Ar beitsumgebung verdeutlichen und die Zusammenarbeit mit den Menschen visualisieren. Mit den vielfältig entstandenen potentiellen Lösungsansätzen kann eine Zukunftsvision von Robotik im Handwerk bei Gebäudesanierung und Gartenpflege aufgezeigt werden.

Sammelbild aller Entwürfe zur Gebäudesanierung
Die teilnehmenden Studierenden resümieren das Projekt der Lehrveranstaltung grundlegend positiv. Die Lehrveranstaltung war eine tolle Möglichkeit notwendige Arbeitsschritte eines Produktentwurfes einmal vollständig zu durchlaufen. Dabei konnten sie sehen wie viel Arbeit für welche Schritte notwendig ist und wie man sich seine Zeit am Besten einteilt. Auch die Expertise der externen Experten war sehr hilfreich, da so der Bezug zur Realität gegeben war und relevante, praxisnahe Anforderungen beachtet werden konnten. So konnten die Bedingungen und Gegebenheiten des jeweiligen Kontextes von Baustellen und Parkanlagen durch die Studierenden besser berücksichtigt und in ihre Entwürfe integriert werden. Dadurch wurde bei manchen Konzepten auch erkannt, dass bestimmte Ideen zum aktuellen Stand von Forschung und Technik noch nicht umsetzbar sind.
Hier seht ihr einige Beispiele der Entwürfe aus beiden Themengebieten.

„ExoX“ – ein Exo-Skelett, welches die Nutzer beim Heben und Tragen von z:B. schweren Werkzeugen oder Materialien unterstützt

„Sandman“ – ein Roboter, welcher autonom Wände abschleifen kann

„unplaster“ – befreit Wände von Putz

„Plasterbot“ – verputzt eigenständig Wände

„Exoarm“ – ein Exo Skelett welches den Nutzer beim Heben, Halten und Über – Kopf – Arbeiten unterstützt, wie das abtrennen von Ästen
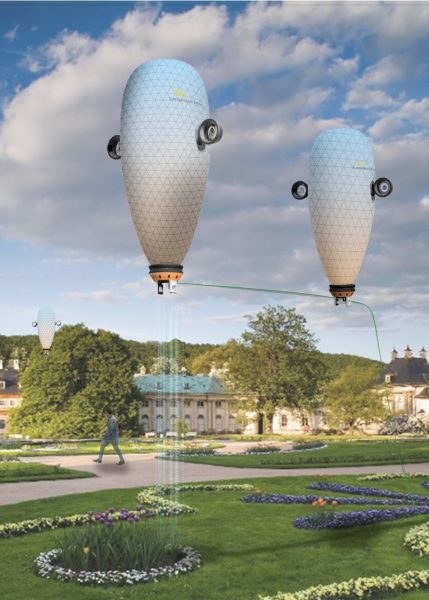
„Skywalker“ – eine Helium-Drohne zur Bewässerung von Pflanzen und Rasen

„Giesela“ – ein autonomes Bewässerungssystem

„Stihl HSA 1000“ – schneidet hohe Hecken automatisch