
Diplomarbeit: Cobot — Chirurgisches Assistenzsystem
Studium · TU Dresden · 7. April 2022 · Technisches Design ·






Schlagwörter: Diplomarbeit, Medizintechnik, Vorsorge
Am Freitag, 08.04.22, um 10:00 findet die Diplomverteidigung von Anika Fitzer statt. (Klicken Sie hier, um an der Besprechung teilzunehmen). In ihrer Arbeit hat sie einen Entwurf eines intelligenten Informationssystems für den OP Dienst entwickelt. Alle Interessierten sind herzlich eingeladen digital dabei zu sein.
Viele chirurgische Eingriffe können durch die Kombination künstlicher Intelligenz und physischer Assistenzsysteme verbessert oder gar erst möglich gemacht werden. Deutlich wird das am Beispiel der roboterassistierten Rektumresektion. Diese Operation wird vor allem bei Enddarmkrebs durchgeführt und ist sehr komplex. Organische Strukturen und die Präparation in der richtigen Gewebeschicht können auch von erfahrenen Operateurinnen und Operateuren nicht immer leicht erkannt werden, sind aber für den Verlauf und das Ergebnis der Operation sehr bedeutend. Dabei ist es einerseits das Ziel, die Krebserkrankung zu heilen, indem das tumorbefallene Gewebe vollständig entfernt wird. Verbliebene Krebszellen können zu Rückfällen führen. Andererseits sollen die körperlichen Funktionen möglichst vollständig erhalten bleiben. Das betrifft bei der Rektumresektion den Erhalt der Stuhl- und Harnkontinenz und den Erhalt von Sexualfunktionen. Die Nerven, über die diese Funktionen gesteuert werden, verlaufen in unmittelbarer Nähe zum Operationsgebiet.

In dem Dresdner Forschungsprojekt CoBot (Colorectal robotic assistant for laparosopic surgery) entwickeln Forschende der VTG Chirurgie der Uniklinik, des Nationalen Zentrums für Tumorerkrankungen Dresden (NCT/UCC) und der Fakultät Elektro- und Informationstechnik der TU Dresden ein KI-gestütztes Assistenzsystem für die roboterassistierte Chirurgie am Enddarm. Nach dem Training des neuronalen Netzes mittels OP-Bildern soll die Assistenz zukünftig die OP-Phasen identifizieren und optimale Schnittlinien und Schnittebene anzeigen. Der Entwurf dieses intelligenten Informationssystems war das Ziel der Diplomarbeit.
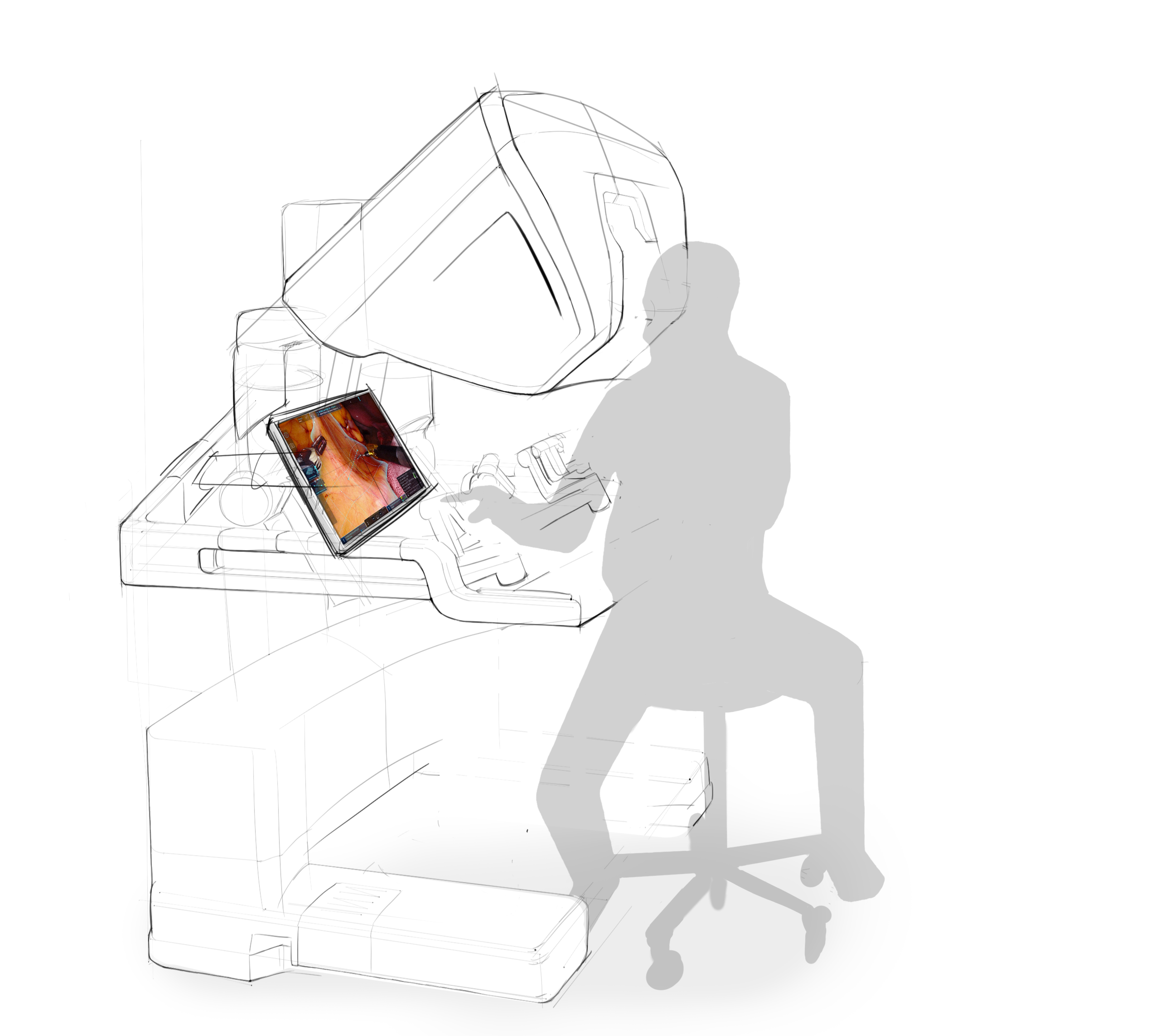
In einer nutzerzentrierten Analyse wurden die Abläufe im OP und die Bedürfnisse der Operateur:innen verstanden und Anforderungen für eine situationsgerechte Unterstützung definiert. Nach Erarbeitung zweier Konzeptansätze, Ableiten eines Designkonzepts und mehrerer Entwurfsvarianten wurde eine Vorzugsvariante als Demonstrator umgesetzt und in einer Nutzerstudie evaluiert. Das Ergebnis ist ein Touch User Interface, welches den Operierenden bedarfsgerecht relevante Informationen während der Operation an der Steuerkonsole in Echtzeit anzeigt und durch eindeutige Interaktionsflächen eine einfache, unmittelbare Bedienung für die Anpassung des Systems ermöglicht. Neben der Bedienbarkeit wurden Aspekte der Akzeptanz und des Vertrauens in geschlossene, selbstagierende Systeme in der Ausarbeitung beachtet.

