Wallbot – Gestaltung robotischer Anwendungen im Bauwesen
Studium · TU Dresden · 13. Juni 2023 · Technisches Design ·






Schlagwörter: Designprozess, Produktentwicklung, studentisches Design
Im Rahmen seines Fachpraktikums hat sich Simon Schmitt mit der Gestaltung eines Verkleidungskonzepts für das bestehende Projekt „Wallbot“ beschäftigt – ein Roboter, der den Mauerprozess automatisiert. Der Fokus lag dabei auf prozesstechnischer Arbeitssicherheit sowie der Akzeptanz autonomer Robotik im Bauwesen, basierend auf diesem Beispiel. Besonders viel Aufmerksamkeit wurde der Kommunikation zwischen Mensch und Maschine gewidmet.
Während des Entwicklungs- und Gestaltungsprozesses wurden folgende Schwerpunkte berücksichtigt:
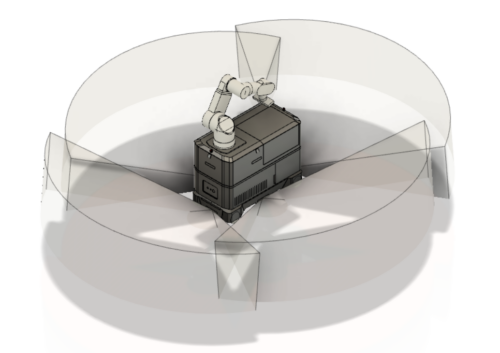
Positionierung und Ausrichtung einer geringen Anzahl an Solid State Lidar Sensoren zur kontinuierlichen Überwachung der direkten Arbeitsumgebung des Roboters.
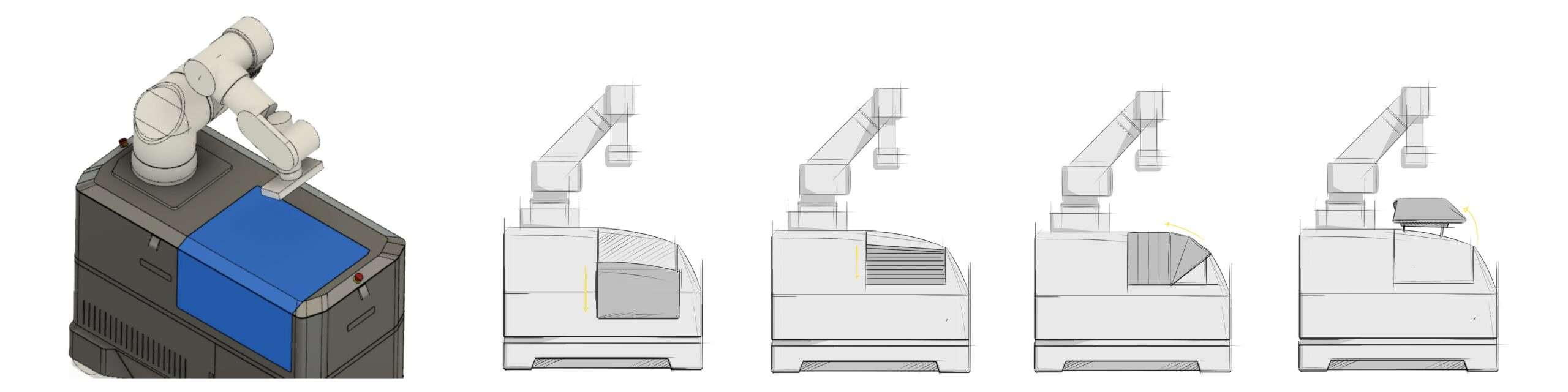
Bewegliche Verkleidungsteile einer Abdeckung, um den Arbeitsraum des Roboters während des Mauersteinschnitts und des Auftragens des Mörtels zu verschließen.
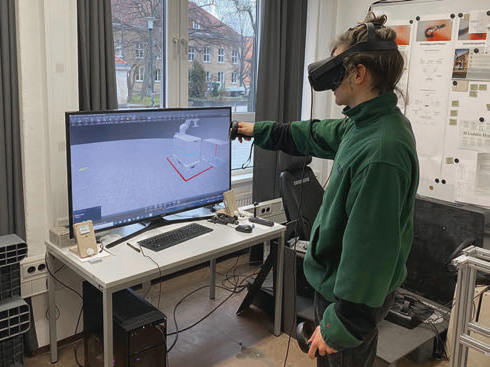
Formal-ästhetische Gestaltung der Maschine in verschiedenen Varianten, die in einer 1:1 VR-Darstellung betrachtet werden konnten.
Angriffspunkte für die Maschinenlogistik auf der Baustelle, wie Kräne und Gabelstapler.

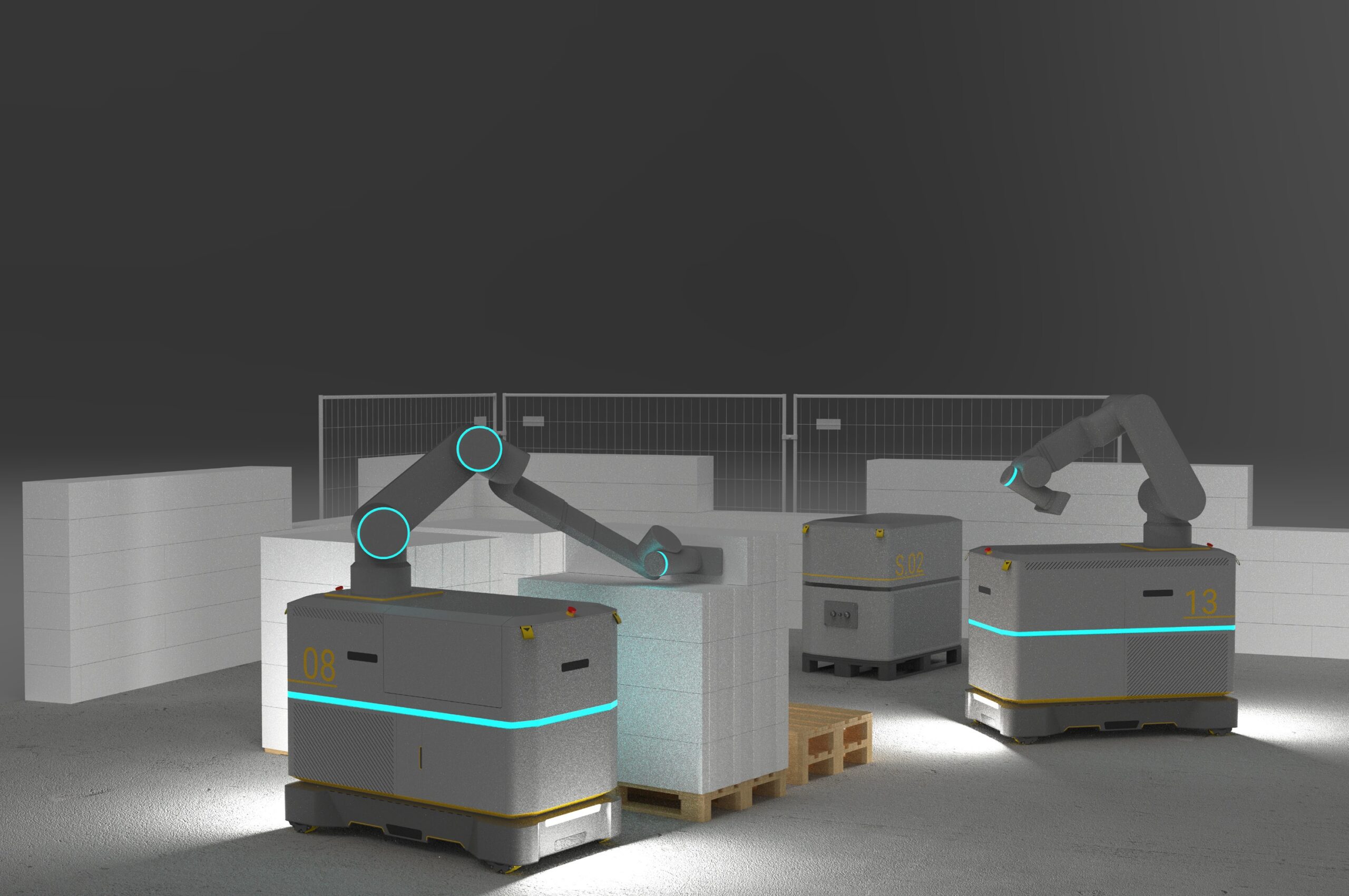
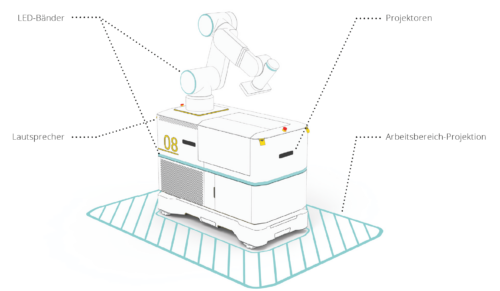
Sicherheitsrelevante Einrichtungen und Schnittstellen zur Kommunikation, wie Not-Halt-Knöpfe und umlaufende Projektionen und LED-Applikationen, über die der Mauerroboter die Möglichkeit der Kommunikation mit Unbeteiligten oder menschlichen Kollegen erhält.


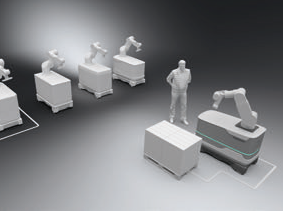
Das Ergebnis ist ein Maschinensystem, das aus mehreren Robotern und einer zusätzlichen Basisstation besteht. Über die Basisstation können Verbrauchsgüter nachgefüllt und die Batterie des Systems wieder aufgeladen werden. Das Design ist schlicht und modern und verzichtet bewusst auf eine optische Vorzugsrichtung während der Fahrt, da das omnidirektionale Fahrwerk eine Fahrt in jede beliebige Richtung zu jeder gegebenen Zeit ermöglicht.
Die Arbeitsergebnisse umfassen eine Vielzahl von Renderings und Animationen des Konzepts im Anwendungskontext. Das Projektteam des Wallbot hat diese Darstellungen zusammen mit dem ersten Prototypen der Maschine erfolgreich auf der weltweit größten Baumaschinenmesse BAUMA im Herbst 2022 in München vorgestellt.