Diplomarbeit: Exoskellet in der Teleoperation
Studium · 20. Januar 2017 · Technisches Design ·






Schlagwörter: Diplomarbeit, Exoskellet, verteidigung
Eine weitere öffentliche Verteidigung am Montag, den 23.01.17, wird Janine Kaspers Diplomarbeit mit dem Titel: „Design concepts of a dual hand and arm force feedback exoskeleton for teleoperation and its deticated work place“ sein. Die Arbeit wurde bei dem Unternehmen „Space Applications Services“ in Brüssel angefertigt.
Zur Erinnerung, um 13 Uhr geht es mit Janine Kaspers Verteidigung los, im Anschluss um 14 Uhr folgt Lisa Lüneburg. Alle Interessierten sind herzlich eingeladen. Beide finden im Zeunerbau, Raum 150 statt.
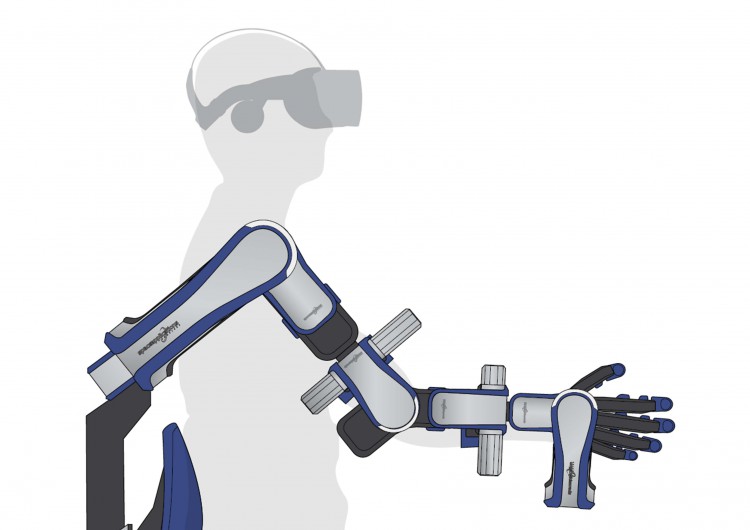
This diploma thesis presents a design concept for a dual arm force-feedback exoskeleton and its dedicated work station which enables intuitive teleoperation of remotely operated vehicles (ROV) in submarine environments. The work is part of the DexROV project at Space Applications Services that aims at enhancing the dexterity and thus the range of applications of ROVs.
While taking into consideration previous projects, two designs for a sample part of the exoskeleton are created guided by user centred design methods. Manufacturing techniques which allow for a fast and iterative creation of physical models and support the realisation of single prototypes or small batches are among the key considerations. Compliance to the corporate identity is another focus. To demonstrate the mechanical and aesthetic properties of the selected design – combining sheet metal parts with 3D printed elements – a 1:1 scale model is built.
Furthermore a work station serving as a foundation for the wearable robotic arms is outlined.
The setup features an ergonomic upright seating posture and ensures the freedom of movement of the operator’s arms. Having defined the context of the exoskeleton, the proposed design is transferred to the whole system. The insights gained throughout the design process are used as baseline for defining a style guide to direct the further realisation of the product.